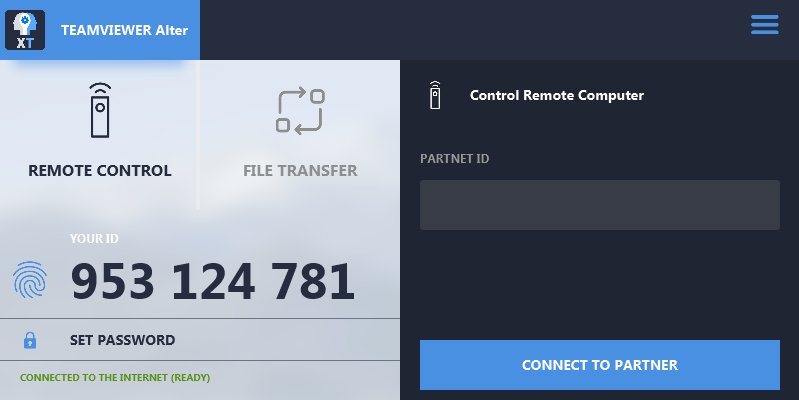
Would it be possible to write a full blown TeamViewer in B4X in just 30 days? That was the question posed about a week ago on the B4X forum. Not a small thing to ask, because how would one get started with something huge as this?
TeamViewer has a lot to offer:
Remote control a PC/Mobile
File Transfer
Clipboard copy between host and client
Advanced Remote functionalities like doing a Reboot
Reduce resolution/remove wallpaper on slow connections
Address book
Multiple connections
…
Could this be done?
Saif Sameer and his team of B4XCode.com say they can. And they even upped the ante by saying they would do it in just 30 days!
They have released the source code of some excellent Android/Desktop apps written in B4X the past few weeks so I have full confidence if they say they can, they will.
This small team of gifted programmers and UX designers have been selling the source code of some eye catching programs made in B4X:
Some of the projects B4XCode.com is selling
They have taken on this challenge in sort of a ‘crowdfunding’ way: if you sign in for just $50, you will receive the full source code of the project! (EDIT: extended to 2021-02-1, normal price $350)
I already did and many others and so should you. Even if you do not plan to use it, the learning experience on how they did it is probably the best money you will spend this year! I’m very excited about this project and am following its progress like a hawk.
We are only one week in, and the first results they’ve shown are very promising indeed.
Some young and interested African tech enthusiasts completed their first IoT course using the free B4X tools from Anywhere Software, congratulations!
In a hackathon event in celebration with International Arduino Day 2019, a deep overview as seminar on B4X products and specifically utilizing B4R with famous micro controllers and technologies was organized.
BANano is a new B4J library to create one-page websites/webapps with (offline) Progressive Web App support. Unlike its big brother ABMaterial, BANano does not rely on any particular framework like Materialize CSS. You will have to write that part yourself, but on the other hand, you have the choice to pick which one.
Why a second framework? Well, from the start ABMaterial was build with a back server in mind. B4J has great support to setup a very powerful jServer to handle web requests. Which does mean all intelligence is at the server side and you have the full power of B4J to do whatever you want (secure database access, serial communication, cache control etc). With B4JS, some of this intelligence could be transferred to the browser side, but the app still needs internet/intranet access so this is as far as it could go.
BANano is a different animal. It can use a Service Worker to ‘install’ the web app in the browser, so it can also work when the user is offline. While ABMaterial builds the page from the server side, BANano builds it from the browser side. This means EVERYTHING you write in B4J is transpiled to JavaScript, HTML and CSS.
But with great power comes great responsibility! Unlike ABMaterial, knowledge of HTML, CSS and to some extend JavaScript is needed to build BANano apps. It makes excellent use of B4X’s SmartStrings to create the HTML part of the app. BANano gives you a set of tools to write your own wrapper around any framework (MiniCSS, Skeleton, Spectre, Bootstrap, …), which then can be easily used to quickly build webapps/websites.
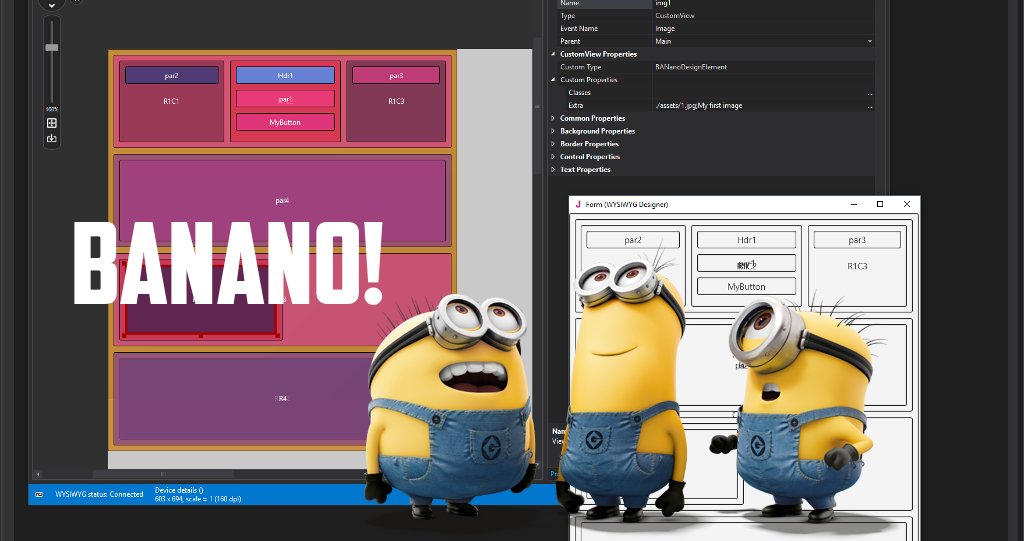
v1.21+: Abstract Designer support:
It is a rather simple and elegant system I think:
1. You set BANanoDesignElement elements in the designer (Add View, Custom view).
Only these properties apply:
2. Each has a Build event where you can do your specific html stuff
3. You load a layout with BANano.LoadLayout. At this time, the bjl file is parsed (as B4J custom components do not support a different parent than main yet, I had to write an alogorithm to find the parent myself) and translated to _Build commands (you will see it in the DemoUI library file).
Sub Class_Globals
End Sub
'Initializes the object. You can add parameters to this method if needed.
Public Sub Initialize
End Sub
Sub Div_Build (el As BANanoDesignElement)
el.Target.Append($"
<div id="${el.Name.ToLowerCase}" class="${el.Classes}"></div>
"$)
End Sub
Sub Row_Build (el As BANanoDesignElement)
el.target.Append($"
<div id="${el.Name.ToLowerCase}" class="${el.Classes}"></div>
"$)
End Sub
Sub Column_Build (el As BANanoDesignElement)
el.target.Append($"
<div id="${el.Name.ToLowerCase}" class="${el.Classes}"></div>
"$)
End Sub
' extra: the level of h;the text
Sub H_Build (el As BANanoDesignElement)
el.target.Append($"<h${el.Extra(0)} id="${el.Name.ToLowerCase}" class="${el.Classes}">${el.Extra(1)}</h${el.Extra(0)}>"$)
End Sub
Sub P_Build (el As BANanoDesignElement)
el.target.Append($"
${el.Extra(0)}</p}>"$)
End Sub
Sub Button_Build (el As BANanoDesignElement)
Dim btn() As BANanoElement = el.target.RenderAppend($"<button id="${el.Name.ToLowerCase}" class="${el.Classes}">${el.Extra(0)}</button>"$,"").Children("#" & el.Name.ToLowerCase)
' defining events is very simple. Note that it has to be run AFTER adding it to the HTML DOM!
' eventName must be lowercase!
btn(0).HandleEvents("click", el.ModuleEventHandler, el.Name.ToLowerCase & "_clicked")
End Sub
' extra: image source;alt text
Sub Image_Build (el As BANanoDesignElement)
el.target.Append($"<img id="${el.Name.ToLowerCase}" src="${el.Extra(0)}" alt="${el.Extra(1)}"/>"$)
End Sub
Using this in a real app is now very simple:
Sub Process_Globals
Private BANano As BANano 'ignore
Private Builder As BANanoMiniCSSBuilder '<-------- defining our BANano Library
End Sub
Sub AppStart (Form1 As Form, Args() As String)
' you can change some output params here
BANano.Initialize("BANano", "BANanoMiniCSS",12)
BANano.HTML_NAME = "banano.html"
BANano.Header.Title="BANano MiniCSS"
BANano.ExternalTestConnectionServer = "http://gorgeousapps.com"
BANano.Header.AddCSSFile("mini-nord.min.css")
' start the build
BANano.Build(File.DirApp)
ExitApplication
End Sub
'Return true to allow the default exceptions handler to handle the uncaught exception.
Sub Application_Error (Error As Exception, StackTrace As String) As Boolean
Return True
End Sub
' HERE STARTS YOUR APP
Sub BANano_Ready()
Builder.Initialize '<------- initialize the library
BANano.LoadLayout("#body", "Layout1", Builder, Me) '<--- load the layout
End Sub
Sub MyButton_Clicked(event As BANanoEvent)
Log("Clicked on " & event.ID)
BANano.GetElement("#r3c2").Empty
BANano.LoadLayout("#r3c2", "SubLayout1", Builder, Me) ' <---- load a sub layout
End Sub
Builder is the library (the one who will handle the Build() events) Me (the one who will handle e.g. the MyButton_Clicked event: so like all other events except Build)
An example project using the MiniCSS javascript library is included in the zip (both the library and a demo project using it) in the DemoUi folder.
Couple of important notes:
1. Both the library and App must be a B4J UI project, not a console project
2. When you now run BuildAsLibrary, the assets in the Files folder will be zipped to Files.zip, next to the .js and .dependsOn files.
Next to the normal responsive page behaviour, in ABMaterial 4.25 for B4J, you will be able to do this with containers too!
Let’s watch it at work first:
This may not sound super special, but it’s a biggie! There are very few frameworks out there that can do this, so I’m very proud of this one.
“Nice but that must ask for a lot of control code, no?“, I hear you ask.
Well, here it is:
gridContainer.IsResponsiveContainer = True
Done! 🙂
Just by setting gridContainer.IsResponsiveContainer = True, you just made the ABMContainer device responsive just like a page. This means you can from now on actually create controls that behave differently depending on the device you are on.
For example, setting this grid on a container, the last 5 cells will wrap differently on a phone, tablet or desktop:
I also added some powerful tools to adjust the layout of your WebApp according to the device you are on:
Page.GetCurrentPageSize:
Returns the current page size (phone, tablet, desktop). You can use this method e.g. in ConnectPage to determine the state of the current page size and act accordingly.
public Sub ConnectPage()
Log("Current page size: " & page.GetCurrentPageSize)
...
End Sub
An event Page_SizeChanged will return the same value in the ‘current’ parameter if the user changes the window size. (It also returns the ‘previous’ state).
Note that this event is NOT raised at load time! Use Page.GetCurrentPageSize to check that.
Sub Page_SizeChanged(previous As String, current As String)
Log(previous & " -> " & current)
Select Case current
Case "phone"
gridContainer.MarginLeft = "0px"
gridContainer.SetFixedWidth("100%")
Case "tablet"
gridContainer.MarginLeft = "210px"
gridContainer.SetFixedWidth("calc(100% - 210px)")
Case "desktop"
gridContainer.MarginLeft = "210px"
gridContainer.SetFixedWidth("calc(100% - 610px)")
End Select
gridContainer.Refresh
End Sub
Containers on a fixed position:
Next to setting a fixed with and height of an ABMContainer, you can now also set a fixed position. This can be handy to create ‘floating’ sidebars for example.
Set a parameter to empty string when you don not want to set it.
These 3 new features used together give you an immense power over how your WebApp should behave depending on the device it is running on, with very little effort.
B4X has grown to be a very powerful player in develop land. The already productive RAD IDE has received a couple of very innovative features to help you even more with your app development. Anywhere Software is always right on top of all the new stuff Android, iOS and all the other supported platforms throw at us. And being stable and reliable makes this a unique environment. The growth of the forum and the quality of the messages/responses are the real proof of this. Thanks a lot Erel for this beautiful tool. It is without a doubt the best cross-platform tool one can use for the moment!
And ABMaterial is lucky to be able to stand on the shoulders of this giant. ABM has surpassed my biggest expectations this year. It is great to see a lot of you are using it to make amazing webapps and even can make a living out of it. This was definitely the ‘year of speed‘. Very few frameworks can match ABM when it comes to develop and execution time. And there is a lot more in the pipeline for the upcoming months!
Thank you all for following my blog! You inspire me every day to push the limits of the tools and frameworks I make.
Rest me only to wish you all the very best and I hope to see you back in 2018!
ABMaterial Dragonfly (4.00) for B4X is available. Yes, it has a new name! What started as version 3.81 got upgraded to a new major version, especially since it uses a new cache control system.
ABMaterial has always been one of the fastest RADs from its start, now over 2 years ago. But with 4.00, we’ll take it to a whole new level!
Mindful and I have spend 5 days (and nights) checking out how we could cache ABMaterial to the extreme without losing any of its functionality. The results are just ridiculous…
Finish times are less than 10% of the time on the second and next loads. So on 3G, on the users next visit(s), the WebApp is almost just as fast as on high speed cable!
And this system not only works with the same page. Once one page has been loaded, all the other pages can take gain of this system. Even when the user revisits your app much later.
Furthermore there is the new debug feature to check how your apps work on different device sizes. See it at work here:
Add this snippet to you main module, AFTER starting the server:
#If DEBUG
' in debug mode, start the browser and open the app on all devices (DOES NOT WORK IF EDGE IS YOUR DEFAULT BROWSER!)
ABM.ViewerOpenAllDevices("http://localhost:" & port & "/" & ABMShared.AppName & "/", 100)
' or open a specific device as default (DOES NOT WORK IF EDGE IS YOUR DEFAULT BROWSER!)
'ABM.ViewerOpenDevice("http://localhost:" & port & "/" & ABMShared.AppName & "/", 300, ABM.VIEWER_TABLET)
' or just open de browser, no multiple devices (should work in Edge)
'ABM.ViewerOpen("http://localhost:" & port & "/" & ABMShared.AppName & "/")
#End If
Lots of new theme properties! Check out the demo on how to use them in the new Dragonfly theme. As winter is coming and days are getting shorter (at least here in the northern hemisphere), I went for a ‘Night’ theme this time.
ABMaterial DragonFly is now available on 750+ locations worldwide on CDN! If you use the CDN, you do not need to upload the css/js/fonts folders to your own server anymore!
This means only your own assets (images etc) from the www folder have to be available on your server. De demo running on abmaterial.com for example is working like this.
The over 20 new fixes and fulfilled wishes make ABMaterial 4.00 very stable, just like its ‘parent’ programming language: B4X. It is a real joy knowing one can depend on a strong, bug free environment. Erel from Anywhere Software rulez!
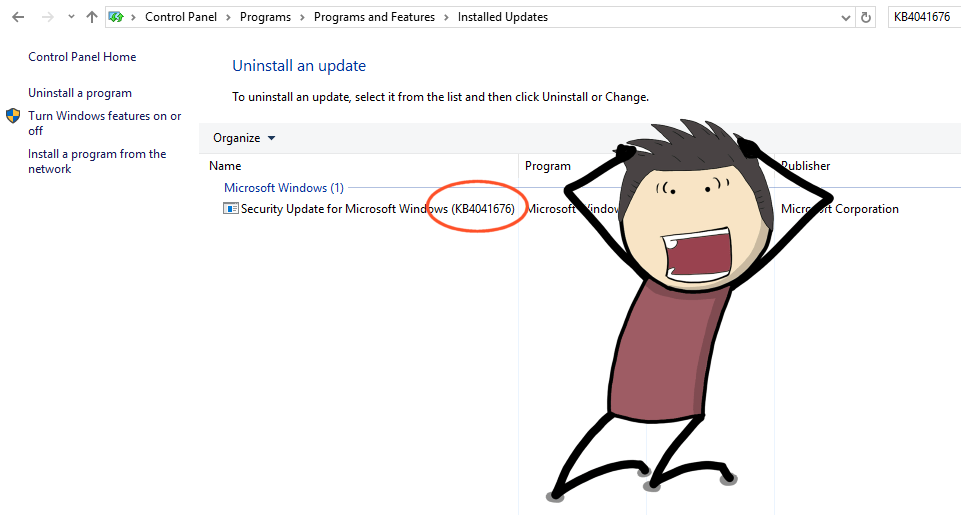
Windows updates, you gotta love them! This October update has a lot of developers scratching their head.
Here at OneTwo, we became first aware of the problem when some clients called our support team with the same remark: “Exporting the data to Excel does not work!” After going through the usual procedure following the directions of Roy Trenneman from the IT crowd “have you tried turning it on and off again?“, we quickly became aware there was something more going on…
Indeed, Microsoft had rolled out a new update. “Drop everything, we have a KB hunt on our hands!” A time consuming thing to do, and in the meantime a lot of worried users. Google and the MSDN site had to do overtime too.
SEE UPDATE FURTHER FOR A MORE PERMANENT SOLUTION!
Quite some time later, we found the little buggers. Here is the list for anyone out there banging his head aginst the wall asking himself why his code, which has been running for years, suddenly stopped working:
Windows 7: KB4041681
Windows 8.1: KB40416393
Windows 10: KB4040724/KB4041676
Uninstall them and reboot. Hooray, code is working again!
UPDATE:
It looks like Windows keeps insisting to run the update. Here is a more permanent solution.
1. Find prior version (4.0.9801.0) of msexcl40.dll
2. Place in another directory. They suggest the application directory, but since in the next step you will modify registry to point to this older version, it can probably go anywhere.
3. Update registry key HKEY_LOCAL_MACHINE\SOFTWARE\Wow6432Node\Microsoft\Jet\4.0\Engines\Excel\win32 to point to the location from step 2.
At OneTwo, we are always searching for ways to make things easier on the workfloor. For nearly a decade, we introduced barcode scanners everywhere! From architects and accountants, over carpenters and contractors, to farmers and gardeners are now using our small barcode scanners to record times, jobs and used materials.
The last couple of weeks, I’ve been investigating how we could tackle another common issue, but now on the factory shop floor. Working on a specific step in the development of a product demands the constant focus of the operator so using a barcode scanner to get the instructions is, well, just not practical if you have your hands full.
Time to get to the lab! Provided with heaps of coffee, some unhealthy snacks and an open mind we started putting some ideas together on the whiteboard. We wanted to give as much feedback to the operator as possible using monitors, beamer projections at the workstation and personal instructions on phones and tablets.
The key to deliver hyper-contextual content to the users is knowing the location of every chess piece in the game: the workstation, the machine that is going to be build and the operator(s). The underlying communication technology was going to be Bluetooth Low Energy (BLE). The Raspberry Pi has it and so does almost any phone or tablet. By attaching a cheap BLE Beacon to the machine we could understand the location of all the players.
Using B4X for this project was a no-brainer, as Erels toolbox is just made to build stuff like this! One important link in the chain was missing: the BLE reader in B4J for the Raspberry Pi. However, writing some small scripts and calling it using jShell and a couple of timers did the job just fine.
Scripts code:
Two scripts to discover BLE devices around the Raspberry Pi. Each one runs in its own jShell in B4J. First one scans for devices, second one reads whatever they broadcast.
Also, as the Raspberry Pi has to be a BLE beacon itself (so the Android Native app can discover it), I had to write another little script:
#!/bin/bash
# Beacon Scan by Alain Bailleul 2017
sudo hciconfig hci0 leadv 3
sudo hcitool -i hci0 cmd 0x08 0x0008 19 02 01 06 03 03 aa fe 11 16 aa fe 10 00 02 6f 6e 65 2d 74 77 6f 07 $1 $2 $3 00 00 00 00 00 00
sudo hciconfig
IPN=$(ip addr show eth0 | awk ‘/inet / {print $2}’ | cut -d/ -f 1)
IPW=$(ip addr show wlan0 | awk ‘/inet / {print $2}’ | cut -d/ -f 1)
MACN=$(ip link show eth0 | awk ‘/ether/ {print $2}’)
MACW=$(ip link show wlan0 | awk ‘/ether/ {print $2}’)
echo “$MACW;$IPW;$MACN;$IPN;END” > macip.txt
For anything related to presenting the instructions, we could use ABMaterial.
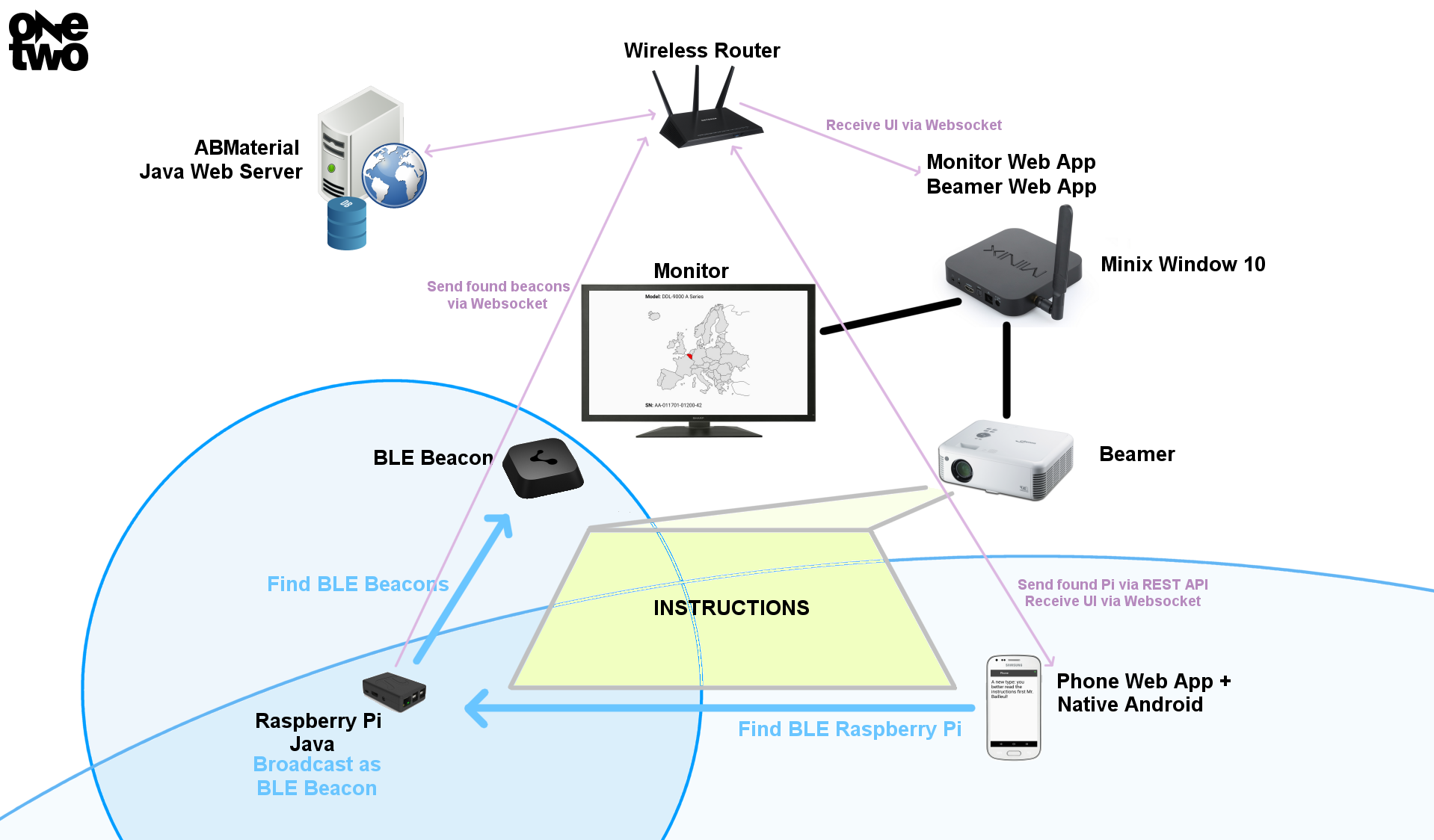
Alright! We’ve got everything we needed to set up a test scenario for a workstation so time to bring out the cool slide:
Although there are a lot of physical components and different OS’s in play, B4X has all the tools to make them seamlessly talk to each other using one language. For the native Android part, I wrote my own BLE discovery library based on the altbeacons library. (Note, there is a library available in B4A to discover BLE devices).
For the video demonstration, things you have to keep in mind:
INPUT:
OneTwo box + BLE beacon: represents a machine arriving on the workstation
Raspberry Pi (under the table): represents the workstation
Android Phone: represents an operator/visitor at the workstation
OUTPUT:
On the monitor, for each ‘machine’ some info is presented (e.g. a serial number, to what country it has to be shipped, etc)
On the phone: specific instructions for the operator(s) for this ‘machine’, or a greeting to a visitor.
On the workstation, projected global instructions for the operator(s) for this ‘machine’ with a beamer.
Let’s have a look how all of this plays out:
This turned out to work all very well for a first trial! For real world usage, the project will need some more work (like improving the algorithms to discover the BLE devices, setting thresholds or calculating them without calibration, etc…). But we are very excited with the possibilities this low-cost solution can already show in such a short time.
Next step will be setting this up on a real workstation on the shop floor in a real factory later this month.
I was wondering if it would be possible to use B4J to program the Lego Mindstorms EV3 Brick for some time. So, some weeks ago, I finally spend a couple of evenings looking into it. And yes, B4J goes Robotics! It uses a modified LeJOS Firmware.
I upgraded LeJOS to support Java 1.8, which is probably the most technical part of the project. I cannot provide it here, as it depends on your Java version but if you follow the next steps, you can build your own. This is done on a Windows PC:
Upgrading the LeJOS Firmware to use Java 1.8
The following procedure will install the java 8 environment compatible with leJOS 9.0 from windows 7. The only extra tool needed is 7ZIP (a free tool) which can generate tar and gz format. In the following I use a temporary directoyr as F:\temp. Replace it with your own temp directory wherever it appears.
Create an account if you dont have one then Accept Licensee agreement and download ejdk-8-xxxxxxx-linux-arm-sflt-xxxxxxxx.tar.gz or the latest java8 jre for EV3.
Unzip this file in your F:\temp directory. For simpler process you may rename the extracted directory as ejdk8. Run 7zip as administrator!
Go to directory ejdk8\ejdk1.8.0\bin. Save the file jrecreate.bat. Now right click on jrecreate.bat and select “modify”. Add one first line to the bat file as SET JAVA_HOME=C:\Progra~2\Java\jdk1.8.xxxx. this is where java8 is installed on my system. Program~2 stand for Program Files (x86) but is easier to type.
Start a command window: Start->All prog->Accessory->commands.
In this window type in the following commands
F:
cd temp
cd ejdk8\ejdk1.8.0\bin
jrecreate.bat –dest newjre –profile compact2 –vm clientIt should start creating the new jre files in the directory “newjre” under ejdk8\ejdk1.8.0\bin
Wait for the final message.
Close the command window.
With file explorer go to F:\temp\ejdk8\ejdk1.8.0\bin. Copy “newjre” directory back to F:\temp
Rename the “newjre” directory as something expected by LeJOS such as
ejre-8-b132-linux-arm-sflt
Right click on it. Open with 7ZIP and add to archive. Select tar format. It will create ejre-8-b132-linux-arm-sflt.tar file.
Right click on tar copy then add archive with gzip format. It will create ejre-8-b132-linux-arm-sflt.tar.gz. You have created the JRE file for java8 expected by EV3.
Insert your SD card and format it.
Copy the ejre-8-b132-linux-arm-sflt.tar.gz under the sd card top directory.
Go to C:\Program Files\leJOS EV3
Now remove the SD from PV and insert the card into the EV3 brick then power it. Wait for the end of the install (about 10mn).
If anything goes wrong, format again the SD, empty the F:\temp directory and restart at step 3. if it persist try another SD card.
Your brick is ready!
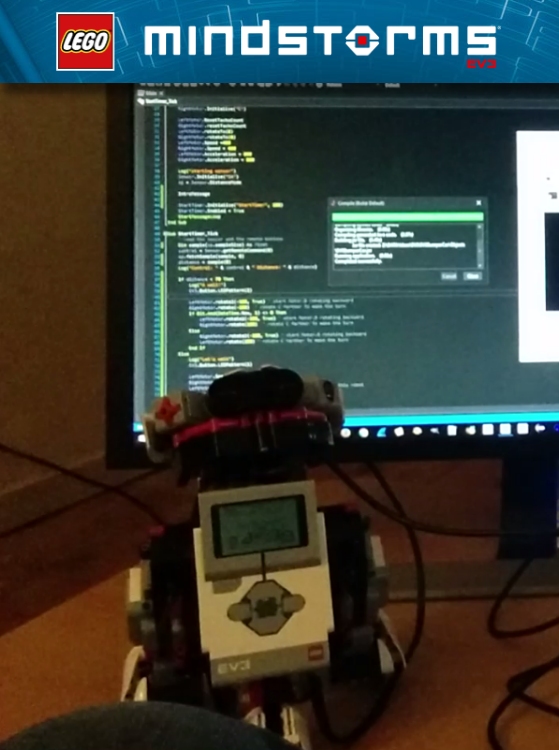
Next I wrote a B4J wrapper for the basics like motors, sensors etc. This project is just a hobby and may grow in the future. But I just wanted to share this first video (badly directed so no Oscars here, unless…)
Obviously, I wanted to test out my code, but I had to build a bot first. Well, I was in for a surprise! It took me over 3 hours to build EV3D4 and I can tell you, I’m not a very patient person so I may have taken some shortcuts in the construction.
What happens in the video:
1. I uploaded the B4J created .jar file to the brick via ssh and I’m ready to start it.
2. After some time, it runs (on the brick shows a disclamer and waits for a key).
3. I disconnect the brick, put it on the ground and press a button on the brick.
4. I programmed the IR sensor so if it sees a wall, it turns away, else it keeps going.
Fun fact is you can use B4J-Bridge.jar on the brick!
This is handy as debugging a Brick is a b*tch. You must have a lot of patience and prepared to restart your brick A LOT. This is not a B4J limitation, just to say how unstable programming a Brick is in general.
Coding is straightforward in B4J (this is all the code I wrote, including turning if it is about to hit a wall):
Sub Process_Globals
Private StartTimer As Timer
Public EV3 As ABLegoEV3
Public LeftMotor As ABLLargeRegulatedMotor
Public RightMotor As ABLLargeRegulatedMotor
Public Sensor As ABLIRSensor
Public sp As ABLSensorMode
Public control As Int = 0
Public distance As Int = 255
End Sub
Sub AppStart (Args() As String)
LeftMotor.Initialize("B")
RightMotor.Initialize("C")
LeftMotor.ResetTachoCount
RightMotor.resetTachoCount
LeftMotor.rotateTo(0)
RightMotor.rotateTo(0)
LeftMotor.Speed = 400
RightMotor.Speed = 400
LeftMotor.Acceleration = 800
RightMotor.Acceleration = 800
Log("starting sensor")
Sensor.Initialize("S4")
sp = Sensor.DistanceMode
IntroMessage
StartTimer.Initialize("StartTimer", 100)
StartTimer.Enabled = True
StartMessageLoop
End Sub
Sub StartTimer_Tick
' read the sensor
Dim sample(sp.sampleSize) As Float
control = Sensor.getRemoteCommand(0)
sp.fetchSample(sample, 0)
distance = sample(0)
Log("Control: " & control & " Distance: " & distance)
If distance < 70 Then
Log("A wall!")
EV3.Button.LEDPattern(2)
LeftMotor.rotate2(-180, True) ' start Motor.B rotating backward
RightMotor.rotate(-180) ' rotate C farther To make the turn
If Bit.And(DateTime.Now, 1) <> 0 Then
LeftMotor.rotate2(-180, True) ' start Motor.B rotating backward
RightMotor.rotate(180) ' rotate C farther To make the turn
Else
RightMotor.rotate2(-180, True) ' start Motor.B rotating backward
LeftMotor.rotate(180) ' rotate C farther To make the turn
End If
Else
Log("Let's walk")
EV3.Button.LEDPattern(1)
LeftMotor.Speed = 400
RightMotor.Speed = 400
LeftMotor.Backward ' my motors are installed inverted on this robot
RightMotor.Backward
End If
End Sub
Sub IntroMessage()
Dim g As ABLGraphicsLCD = EV3.GraphicsLCD
g.clear
g.drawString("Bumper Car Demo", 5, 0, 0)
g.Font = g.Font.SmallFont
g.drawString("Demonstration of the Behavior", 2, 20, 0)
g.drawString("subsumption classes. Requires", 2, 30, 0)
g.drawString("a wheeled vehicle with two", 2, 40, 0)
g.drawString("independently controlled", 2, 50, 0)
g.drawString("motors connected to motor", 2, 60, 0)
g.drawString("ports B and C, and an", 2, 70, 0)
g.drawString("infrared sensor connected", 2, 80, 0)
g.drawString("to port 4.", 2, 90, 0)
' Quit GUI button:
g.Font = g.Font.SmallFont
Dim y_quit As Int = 100
Dim width_quit As Int = 45
Dim height_quit As Int = width_quit/2
Dim arc_diam As Int = 6
g.drawString("QUIT", 9, y_quit+7, 0)
g.drawLine(0, y_quit, 45, y_quit) ' top line
g.drawLine(0, y_quit, 0, y_quit+height_quit-arc_diam/2) ' left line
g.drawLine(width_quit, y_quit, width_quit, y_quit+height_quit/2) ' right line
g.drawLine(0+arc_diam/2, y_quit+height_quit, width_quit-10, y_quit+height_quit) ' bottom line
g.drawLine(width_quit-10, y_quit+height_quit, width_quit, y_quit+height_quit/2) ' diagonal
g.drawArc(0, y_quit+height_quit-arc_diam, arc_diam, arc_diam, 180, 90)
' Enter GUI button:
g.fillRect(width_quit+10, y_quit, height_quit, height_quit)
g.drawString2("GO", width_quit+15, y_quit+7, 0,True)
EV3.Button.WaitForAnyPress
If (EV3.Button.ESCAPE.isDown()) Then
ExitApplication2(0)
End If
g.clear
End Sub
As I said, this is just for fun. No idea how far this will go. You can download the source code for the B4J library from my Github.
Bots are the next hot thing in 2016! So in my spare-spare time I’ve been working on a wrapper for the Telegram API v2.0. It has a rather unconventional API but I’m reworking it to make it very easy to write bots in B4J.
Bots could be very useful as yet another way to ‘talk’ with IoT devices. You can control LEDs, temperatures, ask for stats etc right from within the Telegram Chat App (which runs on about every kind of platform, being the desktop, a browser, iOS, Android, etc…). Or you can, like I did to test the wrapper, write a little game:
Note: this library is in very early stages so the wrapper is not available for download yet. Full source code of the game will also be available when released.
Some sample code to show you how easy it is to write a bot in B4J (this is not the game code, just some tests):
Code to initialize the library:
Sub Process_Globals
Dim ABT As ABTelegram
End Sub
Sub AppStart (Args() As String)
Dim b As MyBot
b.Initialize
ABT.RegisterLongPollingBot(b.Bot)
StartMessageLoop
End Sub
Code for the Bot:
'Class module
Sub Class_Globals
Dim ABT As ABTelegram
Public Bot As ABTLongPollingBot
Private botToken As String = "207189xxxx:yyyyyyyyyyyyyyyyyyyyyyyyyyyyyyyyyyyy"
Private botUserName As String = "zzzzzzzzzBot"
'Private callbackCounter As Int
End Sub
'Initializes the object. You can add parameters to this method if needed.
Public Sub Initialize
Bot.Initialize("Bot", Me, botToken, botUserName)
Dim upds As List = Bot.botgetUpdates
For i = 0 To upds.Size - 1
Dim upd As ABTUpdate = upds.Get(i)
Log("Go update: " & upd.UpdateId)
Next
End Sub
Sub Bot_UpdateReceived(update As ABTUpdate)
Log("Got an update")
If update.hasMessage Then
Dim msg As ABTMessage = update.GetMessage
Log("Message: " & msg.Text)
' Dim userPhotos As ABTUserProfilePhotos = Bot.BotGetUserProfilePhotos(msg.Chat.id)
' Log("photos: " & userPhotos.TotalCount)
' Dim Photos As List = userPhotos.Photos
' For i = 0 To Photos.Size - 1
' Dim photoSizes As ABTPhotoSizes = Photos.Get(i)
' For j = 0 To photoSizes.Sizes.Size - 1
' Dim photoSize As ABTPhotoSize = photoSizes.Sizes.Get(j)
' Dim photoFile As ABTFile = Bot.BotGetFile(photoSize.FileId)
' Log(photoFile.FilePath)
'
' Dim job1 As HttpJob
' job1.Initialize("Job" & j, Me)
' job1.Tag = photoFile.FilePath.Replace("photo/", "")
'
' Dim url As String = "https://api.telegram.org/file/bot" & botToken & "/" & photoFile.FilePath
' job1.Download(url)
' Next
' Next
' callbackCounter = callbackCounter + 1
' Bot.BotSendMessageAsync(callbackCounter, msg.ChatId, "Alweer hallo " & msg.Chat.FirstName)
Bot.BotSendMessage(msg.ChatId, "Using an Emoji " & ":grinning: in the message!") ' see https://github.com/vdurmont/emoji-java for a list of emojis
' Bot.BotSendPhoto(True, msg.ChatId, File.DirApp & "/" & "telegram.png")
' callbackCounter = callbackCounter + 1
' Bot.BotSendDocumentAsync(callbackCounter, True, msg.ChatId, File.DirApp & "/" & "mydocument.pdf", "mydocument.pdf")
' Bot.BotSendDocument(True, msg.ChatId, File.DirApp & "/" & "mydocument.pdf", "mydocument.pdf")
Bot.BotSendAudio(True, msg.ChatId, File.DirApp & "/" & "myaudio.mp3")
' Bot.BotSendVideo(True, msg.ChatId, File.DirApp & "/" & "myvideo.mp4")
' Bot.BotSendSticker(True, msg.ChatId, File.DirApp & "/" & "mysticker.webp")
' Bot.BotSendContact(msg.ChatId, "+32496000000", "Alain")
' Bot.BotSendChatAction(msg.ChatId, ABT.CHATACTIONTYPE_TYPING)
' Bot.BotSendLocation(msg.ChatId, 50.8492, 2.8779)
' Bot.BotSendVenue(msg.ChatId, 50.8492, 2.8779, "my venue", "Grote markt 1")
Bot.BotSendVoice(True, msg.ChatId, File.DirApp & "/" & "telegram.ogg")
' Dim keyb As ABTReplyKeyboard
' Dim rows As List
' rows.Initialize
' Dim tmpRow As ABTInlineKeyboardRow
' tmpRow.Initialize
' tmpRow.AddButton("test button", "http://one-two.com", "", "")
' rows.Add(tmpRow)
' keyb.InitializeAsInlineKeyboardMarkup(rows)
' Bot.BotEditMessageTextEx(msg.ChatId, msg.MessageId, 0, "Extended test", ABT.PARSEMODE_HTML, False, keyb)
Dim rkeyb As ABTReplyKeyboard
rkeyb.InitializeAsForceReplyKeyboard(False)
Bot.BotSendMessageEx(msg.ChatId, "some test: reply please", ABT.PARSEMODE_HTML, False, False, 0, rkeyb)
' Dim rkeyb2 As ABTReplyKeyboard
' Dim rows2 As List
' rows2.Initialize
' For i = 1 To 100
' Dim tmpRow2 As ABTKeyboardRow
' tmpRow2.Initialize
' tmpRow2.AddButton("Press me")
' rows2.Add(tmpRow2)
' Next
' rkeyb2.InitializeAsReplyKeyboardMarkup(rows2,False, False, False)
' Bot.BotSendMessageEx(msg.ChatId, "some test: press the button", ABT.PARSEMODE_HTML, False, False, 0, rkeyb2)
' Dim rkeyb3 As ABTReplyKeyboard
' Dim rows3 As List
' rows3.Initialize
' Dim tmpRow3 As ABTInlineKeyboardRow
' tmpRow3.Initialize
' tmpRow3.AddButton("Show image", "", "showimage", "")
' rows3.Add(tmpRow3)
'
' rkeyb3.InitializeAsInlineKeyboardMarkup(rows3)
' Bot.BotSendMessageEx(msg.ChatId, "some test: press the button", ABT.PARSEMODE_HTML, False, False, 0, rkeyb3)
End If
If update.hasCallbackQuery Then
Dim cquery As ABTCallbackQuery = update.GetCallbackQuery
Log("CallbackQuery: " & cquery.data)
Select Case cquery.Data
Case "showimage"
Dim msg As ABTMessage = cquery.Message
Bot.BotSendPhotoEx(True, msg.ChatId , File.DirApp & "/" & "myphoto.jpg", "A new photo of darth vader!",False, 0, Null )
Bot.BotSendLocation(msg.ChatId, 50.8492, 2.8779)
Bot.BotEditMessageText(msg.ChatId, msg.MessageId, "", "Shown")
End Select
End If
If update.hasInlineQuery Then
Dim ciquery As ABTInlineQuery = update.GetInlineQuery
Log("InlineQuery: " & ciquery.Query)
If ciquery.Query = "loc" Then
Dim lstResults As List
lstResults.Initialize
Dim myanswer As ABTInlineQueryResult
myanswer.InitializeAsLocation("1", 50.8492, 2.8779, "Your location")
lstResults.Add(myanswer)
Bot.BotAnswerInlineQuery(ciquery.Id, lstResults)
End If
End If
If update.hasChosenInlineResult Then
Dim ccresult As ABTChosenInlineResult = update.GetChosenInlineResult
Log("ChosenInlineResult: " & ccresult.Query)
End If
End Sub
Sub Bot_AsyncSendReceived(methodType As String, callbackId As String, success As Boolean, asyncObject As ABTObject)
Log("Async method: " & callbackId & " " & methodType & " " & success)
If success And asyncObject &lt;&gt; Null Then
If asyncObject.objectType="ABTMessage" Then
Dim message As ABTMessage = asyncObject
Log("Async callback: " & message.MessageId)
End If
End If
End Sub
Sub JobDone (Job As HttpJob)
Log("JobName = " & Job.JobName & ", Success = " & Job.Success)
If Job.Success = True Then
Dim fSave As OutputStream = File.OpenOutput(File.DirApp, Job.tag, False)
File.Copy2(Job.GetInputStream, fSave)
fSave.Close
Else
Log("Error: " & Job.ErrorMessage)
End If
Job.Release
End Sub
Excellent news from Erel (CEO of Anywhere Software). The excellent B4X suite will support yet another platform: Arduino! Next to support for all desktop platforms, webapps, Raspberry Pi, Android and iOS this new addition is another great step from Anywhere Software towards the most simple framework to make IoT applications.
Unlike the other platforms which generate Java, B4R will generate native C. Users will be able to write their own libraries or use inline C for specific functionalities. More on this later, but make sure you check out the video!
Great news from Anywhere Software! B4i (a development tool for native iOS applications) is released today.
I had good hopes we would have an early Christmas this year from Erel, but it looks like he has outdone himself (again!).
From its beta release only a couple of weeks ago, B4i looked very stable and already feature rich. Knowing how the B4A (Basic4Android) community quickly has grown very solid, with many contributors creating all kind of great libraries, I have no doubt B4i will be any different. Congratulations Erel with another state-of-the-art development tool!
But let’s give the master himself the stand now (from the official site):
Erel: B4i follows the same concepts of B4A and B4J and provides a simple yet powerful rapid application development tool for iOS applications.
Requirements
– Apple developer account (costs $99 per year).
– An iOS device running iOS 7+.
The compilation process requires a Mac computer. You can either use a local Mac computer or use our Hosted Mac Builder service (currently costs $25 per year).
Documentation
– Tutorials: http://www.basic4ppc.com/android/forum/forums/ios-tutorials.63/
You should start with the following three tutorials:
Creating a certificate and provisioning profile
Installing B4i-Bridge and debugging first app
Developers who use a local Mac: Local Mac Builder Installation
B4i can be purchased from the Anywhere Software Store for just $59!
B4i includes two years of free upgrades.
Hosted Mac Builder
The builder service allows you to develop iOS applications without a Mac computer.
All of the development steps can be done with the builder service except of the final step which is uploading the application to Apple App Store. This step requires a Mac or a service such as MacInCloud.
Note that the builder is currently limited to projects of up to 15mb.
Amazing news from Anywhere software: Erel is working on B4i! This development suite for cross development (Android/Mac/Windows/Linux) will be joined by iOS.
After the great success of Basic4Android (simply the best development tool for Android, by far), Erel suprised us all with Basic4Java last year. A free! tool to create cross platform software for Mac, Windows and Linux.
And now, he has an ever bigger suprise: Basic4iOS!
Just like it’s brother B4A, B4i will compile to native code (Objective C in this case). Combined with the powerful IDE (Xojo, check this one out, it’s bug free and blazing fast) with its unique debugging capabilities and features, this is a certain winner, again!
As a Windows developer, you won’t even need a Mac to compile:
…The current plan is to host a cloud of Macs for the compilation which means that developers will not need to have access to a Mac computer. There will also be an option to host the remote Mac compiler locally instead of the cloud compilers…
And the clever debugging tricks well known from B4A will also be at your fingertips:
…The rapid debugger will allow modifying the code without rebuilding the package making the “testing cycle” much quicker…
It’s simply amazing how Anywhere Software can build such powerful (and most of all stable and reliable) development tools in such a short time span. And at a price that dwarfs the competition!
Well done Erel! We are looking forward for this little beauty by the end of this year. It’s gonna be great, I’m sure of that!
I’m currently working on my new Android app called QuiQRun and this is the first time it is presented to the public. It is currently in the testing phase so it won’t be long until I will release it to Google Play.
What is QuiQRun?
QuiQRun consists of two main parts:
1. The White side: Save – Share – Scan QR Codes
• Scan QR Codes and barcodes with our fast build in scanner
• Decrypt codes created with QuiQRun Security and read codes generated by other apps
• A human readable summary and the raw QR data
• Save codes for later use. All codes are organized in a nice list for easy retrieval.
• Share your QR Code on Facebook, Twitter, Email, Dropbox and many more…
• Use the QR Code immediately on your smartphone
2. The Black side: Make – Share – Protect QR Codes
• Make QR Codes for Websites, Wifi, Contacts, locations, coupons and many more…
• Protect your QR Code with QuiQRun Security
– Encryption
– Prevent saving the QR Code
– Password or PIN protect
– Set an expiration date
• Share your QR code on Facebook, Twitter, Email, Dropbox and many more…
• Use the QR Code immediately on your smartphone
And here are the first screenshots! QuiQrun on Android
QuiQRun is written in Basic4Android. If you are a licensed user of B4A you can download an exclusieve preview version from the B4A ‘Test my App!’ forum! I would definitely appreciate the feedback 🙂
More information and screenshots can be found at QuiQRun
The coming weeks I’ll keep you up to date. Follow me on Twitter: QuiQRun
It has been a while since I’ve written a new article on this blog because it have been busy months both at work and in my personal life. One of the things I wanted to do was writing an easy to use Game Engine for B4A. I have written the ABPhysics engine in the past and recently Informatix pointed out I had started another engine (ABGameEngine) before that. Development on ABGameEngine was stopped early for several reasons: time was one of them, but also because several other developers were working on an engine themselves. It seemed a little bit pointless to continue.
However, the other engines were not further developed either. Until recently Erel came up with the GameView. This is an excellent View that will cover the needs of a lot of beginning programmers. I definitely would like to urge starting game developers to take a look at this. Registered users of B4A can download the GameView lib from here.
But still, I wanted something more. I looked at ABgameEngine again, as it had some great ideas like layers, animated sprites, gamepads etc. But it was also very old code and not written very well. And it crashed all the time 🙂
I decided to restart from scratch a couple of weeks ago. Some weekends and evenings later ABPlay was born! And with a lot of goodies!
Here is a small demo video of what I got so far. it demonstrates the following:
1. Layers
(Layer 1) the moving background with the Odies as animated sprites
(Layer 2) the black foreground layer with a weird dancing creature that passes now and then
2. Animated sprites, not bound to a layer
(our hero Garfield is back!)
3. A sprite can have different animations.
(like one for standing, one for walking, one for fighting, etc)
4. A sprite can have different predefined 'Walks'
(A walk can be build like you would build a path. It's a sequence of lines, bezier curves, wait periods etc. It's like a simple flash movie)
5. Gamepad controls
(the 'joystick' pad on the left)
(the 'action' pad on the right)
(the 'direction' pad as an alternative to the joystick, not shown in this video)
6. In the demo I cannot demonstrate it with a mouse, but it is completely multi touch
(You can control Garfield AND press the Action button X AND do a swipe anywhere at the same time)
But let’s have a look (beware this is running on the Emulator. On a real device it is much smoother):
I’m actually very pleased with the result. The graphics and handling is very smooth.
Above all, it’s still very easy to program. Here is the whole code for the demo app:
#Region Project Attributes
#ApplicationLabel: ABPlayTest
#VersionCode: 1
#VersionName:
'SupportedOrientations possible values: unspecified, landscape or portrait.
#SupportedOrientations: landscape
#CanInstallToExternalStorage: False
#End Region
#Region Activity Attributes
#FullScreen: true
#IncludeTitle: false
#End Region
Sub Process_Globals
End Sub
Sub Globals
Dim myPlay As ABPlay
' the panel that will hold the ABPlay
Dim myPanel As Panel
' a background and foregroud layer
Dim bgLayer As ABLayer
Dim fgLayer As ABLayer
' some colors to show the multi touch points in the demo
Dim myColors() As Int = Array As Int(Colors.Red, Colors.Green, Colors.Blue, Colors.Cyan, Colors.Yellow, Colors.Gray, Colors.White, Colors.Magenta, Colors.LightGray, Colors.DarkGray)
' our hero
Dim Hero As ABSprite
' our enemies
Dim Enemies As List
' param to set the set the speed
Dim Speed As Float = 0.2
' some variables to hold the current state of the hero
Dim currentAction As String
Dim currentDirection As String
Dim currentIsStanding As Boolean
End Sub
Sub Activity_Create(FirstTime As Boolean)
' initialize ABPlay with myPanel
myPanel.Initialize("")
Activity.AddView(myPanel, 0,0,100%x,100%y)
myPlay.Initialize(myPanel, "myPlay")
'////////////// BEGIN loading sprite sequences
' Load Sprite Sequences
myPlay.LoadSpriteSequence("GarStandingLeft",LoadBitmap(File.DirAssets, "garleftstill.png"),6, 1, 1000)
myPlay.LoadSpriteSequence("GarStandingLeft",LoadBitmap(File.DirAssets, "garleftstill.png"),6, 1, 1000)
myPlay.LoadSpriteSequence("GarStandingRight",LoadBitmap(File.DirAssets, "garrightstill.png"),6, 1, 1000)
myPlay.LoadSpriteSequence("GarWalkingLeft",LoadBitmap(File.DirAssets, "garleft.png"),8, 1, 1000)
myPlay.LoadSpriteSequence("GarWalkingRight",LoadBitmap(File.DirAssets, "garright.png"),8, 1, 1000)
myPlay.LoadSpriteSequence("GarStandingLeftFight",LoadBitmap(File.DirAssets, "garleftstillfight.png"),2, 1, 250)
myPlay.LoadSpriteSequence("GarStandingRightFight",LoadBitmap(File.DirAssets, "garrightstillfight.png"),2, 1, 250)
myPlay.LoadSpriteSequence("GarWalkingLeftFight",LoadBitmap(File.DirAssets, "garleftfight.png"),7, 1, 1000)
myPlay.LoadSpriteSequence("GarWalkingRightFight",LoadBitmap(File.DirAssets, "garrightfight.png"),7, 1, 1000)
' and the ones for Odie
myPlay.LoadSpriteSequence("OdieStandingLeft", LoadBitmap(File.DirAssets, "odieleftstill.png"),7,1,Rnd(800,1200))
myPlay.LoadSpriteSequence("OdieStandingRight", LoadBitmap(File.DirAssets, "odierightstill.png"),7,1,Rnd(800,1200))
myPlay.LoadSpriteSequence("OdieWalkingLeft", LoadBitmap(File.DirAssets, "odieleft.png"),5,1,Rnd(800,1200))
myPlay.LoadSpriteSequence("OdieWalkingRight", LoadBitmap(File.DirAssets, "odieright.png"),5,1,Rnd(800,1200))
' and the one for the creature
myPlay.LoadSpriteSequence("CreaturePassToRight", LoadBitmap(File.DirAssets, "creature.png"), 3, 4, 1200)
'////////////// END loading sprite sequences
'////////////// BEGIN building the Hero Garfield
' initialize the hero
Hero.Initialize("Hero", 50%x, 50%y)
' add sprite sequences
Hero.AddSpriteSequence("GarStandingLeft")
Hero.AddSpriteSequence("GarStandingRight")
Hero.AddSpriteSequence("GarWalkingLeft")
Hero.AddSpriteSequence("GarWalkingRight")
Hero.AddSpriteSequence("GarStandingLeftFight")
Hero.AddSpriteSequence("GarStandingRightFight")
Hero.AddSpriteSequence("GarWalkingLeftFight")
Hero.AddSpriteSequence("GarWalkingRightFight")
Hero.StartSpriteSequence("GarStandingLeft", True)
currentDirection="LEFT"
'////////////// END building the Hero Garfield
'////////////// BEGIN building the background layer with Odies
' initalize a background layer
bgLayer.Initialize("background", 0,0)
bgLayer.SetBackground(LoadBitmap(File.DirAssets, "bga.jpg"), 1.0)
myPlay.AddLayer(bgLayer)
' initialize some enemies
Enemies.Initialize
Dim a As Int
For a = 1 To 10
Dim Odie As ABSprite
' initialize an Odie with some animation sequences
Odie.Initialize("Odie" & a, Rnd(10%x,90%x), Rnd(10%y, 90%y))
' add multiple sprite sequences
Odie.AddSpriteSequences(Array As String("OdieStandingLeft","OdieStandingRight","OdieWalkingLeft","OdieWalkingRight"))
' create a random walk to the right
Dim WalkRight As ABSpriteWalk
WalkRight.Initialize("ToTheRight", True)
Dim newX As Int = Odie.x+Rnd(20%x, 80%x)
WalkRight.AddLine("OdieWalkingRight",Odie.x, Odie.y, newX, Odie.y, Rnd(90,100))
WalkRight.AddWait("OdieStandingRight",newX, Odie.y, Rnd(10,50))
WalkRight.AddLine("OdieWalkingLeft",newX, Odie.y, Odie.x, Odie.y, Rnd(90,100))
WalkRight.AddWait("OdieStandingLeft",Odie.x, Odie.y, Rnd(10,50))
Odie.AddWalk(WalkRight)
' create a random walk to the left
Dim WalkLeft As ABSpriteWalk
WalkLeft.Initialize("ToTheLeft", True)
Dim newX As Int = Odie.x-Rnd(20%x, 80%x)
WalkLeft.AddLine("OdieWalkingLeft",Odie.x, Odie.y, newX, Odie.y , Rnd(90,100))
WalkLeft.AddWait("OdieStandingLeft",newX, Odie.y, Rnd(10,50))
WalkLeft.AddLine("OdieWalkingRight",newX, Odie.y, Odie.x, Odie.y, Rnd(90,100))
WalkLeft.AddWait("OdieStandingRight",Odie.x, Odie.y, Rnd(10,50))
Odie.AddWalk(WalkLeft)
' pick random a walk, left or right
Dim GoLeft As Int = Rnd(0,2)
If GoLeft = 0 Then
Odie.StartWalk("ToTheRight")
Else
Odie.StartWalk("ToTheLeft")
End If
bgLayer.AddSprite(Odie)
Next
'////////////// END building the background layer with Odies
'////////////// BEGIN building the foreground layer with creature
' initalize a foreground layer
Dim fgLayer As ABLayer
fgLayer.Initialize("foreground", 0,0)
fgLayer.SetBackground(LoadBitmap(File.DirAssets, "fga.png"), 100%y/400)
myPlay.AddLayer(fgLayer)
' and a weird creature...
Dim creature As ABSprite
creature.Initialize("creature", -100%x, 100%y-240)
creature.AddSpriteSequence("CreaturePassToRight")
' with a walk
Dim pass As ABSpriteWalk
pass.Initialize("DanseToTheRight", True)
pass.AddLine("DansingRight",creature.x, creature.y, 200%x, creature.y, 300)
creature.AddWalk(pass)
' and start the walk
creature.StartWalk("DanseToTheRight")
' add the creature to the foreground layer
fgLayer.AddSprite(creature)
'////////////// END building the foreground layer with creature
'////////////// BEGIN Add game pads
' initialize and start a Joystick Gamepad
myPlay.InitializeJoystickPad(18, 100%y-210, 192, 192 , LoadBitmap(File.DirAssets, "joystick_bg.png"),LoadBitmap(File.DirAssets, "joystick.png"))
myPlay.ShowJoystickPad(True)
' initialize and start a Action Gamepad
myPlay.InitializeActionPad(100%x-210, 100%y-210, 192, 192 , LoadBitmap(File.DirAssets, "action_active.png"),LoadBitmap(File.DirAssets, "action_inactive.png"),LoadBitmap(File.DirAssets, "action_mask.png"),True, False, True, False)
myPlay.ShowActionPad(True)
'////////////// END Add game pads
End Sub
Sub Activity_Resume
End Sub
Sub Activity_Pause (UserClosed As Boolean)
' NEEDED FOR THE MOMENT TO CATCH THE HOME KEY, RESUME/PAUSE NOT YET SUPPORTED!
myPlay.StopAndRecycle
Activity.Finish
End Sub
Sub Activity_KeyPress (KeyCode As Int) As Boolean 'Return True to consume the event
Select Case KeyCode
Case KeyCodes.KEYCODE_BACK
' NEEDED: stop the drawing thread and recycle stuff
myPlay.StopAndRecycle
Activity.Finish
Return True
Case KeyCodes.KEYCODE_HOME
Return True
End Select
End Sub
Sub myPlay_Draw(c As Canvas, State As ABState)
' the actual drawing, do NOT set a debug stop in here!
'////////////// BEGIN Calculation stuff
' calculate hero stuff depending on what buttons we pressed on the gamepad
currentAction = ""
If State.UsingActionPad Then
' go into fight state
If State.ACTION_X Then
currentAction = "X"
End If
' go back to center
If State.ACTION_Y Then
Hero.SetPostition(50%x,50%y)
End If
End If
Dim XMovement As Int
Dim YMovement As Int
If State.UsingJoystickPad Then
XMovement = State.JOYSTICK_X*Speed
YMovement = State.JOYSTICK_Y*Speed
' update the hero's position and direction
If XMovement<0 Then
currentDirection = "LEFT"
Else
currentDirection = "RIGHT"
End If
Hero.SetPostition(Hero.x+XMovement, Hero.y+YMovement)
currentIsStanding = False
Else
currentIsStanding = True
End If
' set the animation type
Select Case currentDirection
Case "LEFT"
Select Case currentAction
Case "X"
If currentIsStanding Then
Hero.StartSpriteSequence("GarStandingLeftFight", False)
Else
Hero.StartSpriteSequence("GarWalkingLeftFight", False)
End If
Case Else
If currentIsStanding Then
Hero.StartSpriteSequence("GarStandingLeft", False)
Else
Hero.StartSpriteSequence("GarWalkingLeft", False)
End If
End Select
Case "RIGHT"
Select Case currentAction
Case "X"
If currentIsStanding Then
Hero.StartSpriteSequence("GarStandingRightFight", False)
Else
Hero.StartSpriteSequence("GarWalkingRightFight", False)
End If
Case Else
If currentIsStanding Then
Hero.StartSpriteSequence("GarStandingRight", False)
Else
Hero.StartSpriteSequence("GarWalkingRight", False)
End If
End Select
End Select
' update the hero animation
Hero.Update
' move our backgrounds, does not make sense but shows the possibilities
Dim newX, newY As Int
Dim newMovementX, newMovementY As Int
newMovementX=Min(Abs(XMovement),1)
newMovementY=Min(Abs(YMovement),1)
If currentIsStanding = False Then
If currentDirection = "LEFT" Then
newX = bgLayer.ViewX
newY = bgLayer.ViewY
If newX-newMovementX >= 0 Then
newX = newX-newMovementX
End If
If newY-newMovementY >= 0 Then
newY = newY-newMovementY
End If
bgLayer.SetLayerPostion(newX, newY)
Else
newX = bgLayer.ViewX
newY = bgLayer.ViewY
If newX+newMovementX <= bgLayer.OuterWidth - myPlay.Width Then
newX = newX+newMovementX
End If
If newY+newMovementY <= bgLayer.OuterHeight - myPlay.Height Then
newY = newY+newMovementY
End If
bgLayer.SetLayerPostion(newX, newY)
End If
End If
'////////////// END Calculation stuff
'////////////// BEGIN Drawing stuff
'ok, all the calulations are done, let's draw!
' draw the background layer with all its sprites on it and advance all sprite animations and walks
myPlay.DrawLayer("background", c)
Dim a As Int
' draw the multitouch points that are not on the gamepad, no action here but just to show the possibilities
For a = 0 To State.touchPoints.Size - 1
Dim tmpP As ABTouchPoint
tmpP = State.touchPoints.GetValueAt(a)
c.DrawCircle(tmpP.X, tmpP.Y, 50dip, myColors(tmpP.id), True, 1dip)
Next
' draw the hero
Hero.Draw(c)
' draw the foreground layer with all its sprites on it and advance all sprite animations and walks
myPlay.DrawLayer("foreground", c)
'////////////// END Drawing stuff
' NEEDED: very last line of the Draw event. Let ABPlay know it may process touches again!
myPlay.DrawDone()
End Sub
I’m not there yet, but it’s a good start. It needs a lot more testing and a lot of new features.
2013. When I was a teenager this looked like a magic number. It was the eighties and a golden age for science fiction. We were born at the exact right time. The 21st century was just around the corner and we would get a glimpse of all the marvel that was going to unfold in front of us. I remember my brother and I making some sandwiches just before six o’clock so we wouldn’t miss a thing of our favorite show: Star Trek! When the opening sequence came on, we left planet Earth for 45 exciting minutes. Our heroes were solving an interstellar mystery every week: a PADD in one hand, a Tricorder in the other. Violence was wrong and only used as a last resort. Phasers to stun! We loved the stories and fantasied about the new technology exposed to us. And when dad gave us our first x86, the world was at our fingertips…
And it looked very promising all through the nineties. HAL spoke to us (with a much friendlier voice) and the internet became our realm. Every geek in the technology business had some sort of Star Trek memorabilia in their office. The stories of the writers/visionaries were coming alive! Part of our gadgets today came from the imagination of someone holding a pen in their hand. The PADDs became iPads and our smartphones became the new Tricorders. After TNG we continued our journey with DS9, Voyager and Enterprise. (If you come across the DVD boxes of any of those series, don’t hesitate. Buy them and you’re in for a real treat!)
And then it stopped… almost at the same time the final episodes of this great show rolled out on our TVs…
The first decade of the 21st century was nothing like what we were dreaming of. Yes, we got some of the gadgets our heroes used to save the galaxy, but at a price. Literally. How did the Ferengi ever come up with the Rules of Acquisition? I think they found the book on earth. Every ‘new’ thing is just like the old one. I don’t care for thinner or more lightweight. (I know your wet dream is to let us buy just air someday!)
Don’t get me wrong: I’m not a synic. I just do miss my shows. I do not need another ultra-violent, incomprehensible and randomly twisted serie that is cancelled way too early. I want a good story with a wealth of imagination that makes me wonder when I’m lying in bed. Images that let me play around with new ideas and make me want to ponder on great inventions. Reaching for the stars at warp 9.7!
So this is a cry out to all science fiction writers. Please, please let us dream again. Humanity needs a new Star Trek. Desperately…
This version includes several important new features:
– Designer scripts – this is probably the most innovative feature added to Basic4android since the first version. It will make it much easier to support different screen sizes and resolutions.
As quoted from the B4A website:
One of the most common issues that Android developers face is the need to adopt the user interface to devices with different screen sizes.
As described in the visual designer tutorial, you can create multiple layout variants to match different screens.
However it is not feasible nor recommended to create many layout variants.
Basic4android v1.9 introduces a new tool named “designer scripts” that will help you fine tune your layout and easily adjust it to different screens and resolutions.
The idea is to combine the usefulness of the visual designer with the flexibility and power of programming code.
– B4A-Bridge – now supports Bluetooth connections as well as wireless connections.
– Java 7 JDK is supported.
– The logging system was improved and all error messages should now show in the filtered logs.
– List.SortType – new method that allows sorting items of custom types based on one of the type fields.
– Bug fixes and other minor improvements.
Read more on the new exciting scripts feature here.
I’ve added the Camera object to the ABExtDrawing library for Basic4Android. This object must not be confused with the hardware camera. There are other libraries available for that. The new version 1.1 of the library can be downloaded from the B4X website.
The camera I’m talking about is a nice feature you can use to do 3D effects on the canvas without using OpenGL. The picture above is just a noral B4A canvas where we did some rotations and translations on. It simulates a scrolling list where the listitems rotate around their axe.
Additional, I shows other features of the ABExtDrawing library to do some lighting effects.
We create a new type item3D. This will hold one item in the list.
Sub Process_Globals
Type item3D (bmp As Bitmap, Top As Int, Left As Int, Width As Int, Height As Int)
End Sub
We also have to declare some variables. Note our mCamera variable which will do the 3D conversions and some constants for our lighting effects. On a Paint object we can set color filters which will affect the color values of what we draw with that Paint object. SetLightingColorFilter takes care of that. A LightingColorFilter takes two colors that are used to modify the colors that we are drawing. The first color will be multiplied with the colors we draw, while the second one will be added to the colors we draw. The multiplication will darken the color and adding will make it brighter so we can use this class to model both shadows and highlights. It would have been even better if instead of adding it would have implemented the screen blend mode, but add works OK.
To actually calculate the light we’ll use a simplified version of Phong lighting.
Sub Globals
'These global variables will be redeclared each time the activity is created.
'These variables can only be accessed from this module.
Dim items As List
Dim HalfHeight As Float
Dim SCALE_DOWN_FACTOR As Float: SCALE_DOWN_FACTOR = 0.15
Dim DEGREES_PER_SCREEN As Int: DEGREES_PER_SCREEN = 270
' Ambient light intensity
Dim AMBIENT_LIGHT As Int: AMBIENT_LIGHT = 55
' Diffuse light intensity
Dim DIFFUSE_LIGHT As Int: DIFFUSE_LIGHT = 200
' Specular light intensity
Dim SPECULAR_LIGHT As Float: SPECULAR_LIGHT = 70
' Shininess constant
Dim SHININESS As Float: SHININESS = 200
' The Max intensity of the light
Dim MAX_INTENSITY As Int: MAX_INTENSITY = 0xFF
Dim CurrentRotation As Int
Dim CurrentTop As Int
Dim MyCanvas As Canvas
Dim ScreenTop As Int: ScreenTop = 1
Dim Panel1 As Panel
Dim ExDraw As ABExtDrawing
Dim mCamera As ABCamera
Dim mMatrix As ABMatrix
Dim mPaint As ABPaint
Dim PI As Double: PI= 3.141592653589793238462643383279502884197
Dim ClearRect As Rect
Dim CurrY As Int
End Sub
In the Activity_Create sub we initialize mCamera and the other variables like mPaint which we will also need for our lighting. Also our pictures are preloaded.
Sub Activity_Create(FirstTime As Boolean)
Activity.LoadLayout("1")
MyCanvas.Initialize(Panel1)
HalfHeight = Activity.Height / 2
Dim backbmp As Bitmap
backbmp.Initialize(File.DirAssets, "background.png")
Dim backbmp2 As Bitmap
backbmp2.Initialize(File.DirAssets, "background2.png")
Dim backbmp3 As Bitmap
backbmp3.Initialize(File.DirAssets, "background3.png")
Dim conbmp As Bitmap
conbmp.Initialize(File.DirAssets, "contact_image.png")
Dim conbmp2 As Bitmap
conbmp2.Initialize(File.DirAssets, "contact_image2.png")
Dim conbmp3 As Bitmap
conbmp3.Initialize(File.DirAssets, "contact_image3.png")
items.Initialize
Dim i As Int
Dim random As Int
For i = 0 To 19
random = Rnd(0,3)
If random = 0 Then
items.Add(CreateNewItem(backbmp, conbmp, "Colleague " & i, "Name of colleague " & i, 25, i*175, Activity.Width - 50, 120))
Else
If random = 1 Then
items.Add(CreateNewItem(backbmp2, conbmp2, "Friend " & i, "Name of friend " & i, 25, i*175, Activity.Width - 50, 120))
Else
items.Add(CreateNewItem(backbmp3, conbmp3, "Client " & i, "Name of the client " & i, 25, i*175, Activity.Width - 50, 120))
End If
End If
Next
CurrentRotation = -(DEGREES_PER_SCREEN * ScreenTop) / Activity.Height
ClearRect.Initialize(0,0,Activity.Width, Activity.Height)
mCamera.Initialize
mMatrix.Initialize
mPaint.Initialize
mPaint.SetAntiAlias(True)
mPaint.SetFilterBitmap(True)
DrawMe
End Sub
The sub CreateNewItem() is used to make one list item. Default B4A canvas drawing functions are used to show how well they work together with the ABExtDrawing functions.
Sub CreateNewItem(Background As Bitmap, icon As Bitmap, Subj As String, desc As String, Left As Int, Top As Int, Width As Int, Height As Int) As item3D
Dim item As item3D
Dim c As Canvas
item.Initialize
item.bmp.InitializeMutable(Width, Height)
c.Initialize2(item.bmp)
' background
Dim dstR As Rect
dstR.Initialize(0,0,Width,Height)
c.DrawBitmap(Background,Null, dstR)
' draw Icon
dstR.Initialize(15,15, icon.Width, icon.Height)
c.DrawBitmap(icon, Null, dstR)
c.DrawText(Subj, 100, 30,Typeface.DEFAULT_BOLD,16, Colors.White,"LEFT")
c.DrawText(desc, 100, 60, Typeface.DEFAULT,16, Colors.White,"LEFT")
item.Top = Top
item.Left = Left
item.Width = Width
item.Height = Height
Return item
End Sub
In the drawItem() sub all calculations are done for one item in the list. Each item will be a block that will rotate around its X-axis and look like it is rolling on the ground when the list stars to scroll. Each block will be as wide as the item normally is and the depth will be the same as the height. We’ll use the same bitmap for all the sides.
So what do we need to do to achieve this effect? In order to draw the blocks we need to draw the bitmap two times (since we will almost always see two sides of the block). We also need to have some kind of rotation variable to keep track of the main rotation. Since the blocks should rotate when the user scrolls the list and the blocks should have the same rotation (so that they all face up at the same time, see further).
Sub DrawItem(item As item3D)
Dim CenterX As Float
Dim CenterY As Float
' get centerX AND centerY
CenterX = item.Width / 2
CenterY = item.Height / 2
' get scale
Dim distFromCenter As Float
distFromCenter = (item.Top + CenterY - HalfHeight) / HalfHeight
Dim scale As Float
scale = (1 - SCALE_DOWN_FACTOR * (1 - Cos(distFromCenter)))
' get rotation
Dim RotationX As Float
RotationX = CurrentRotation - 20 * distFromCenter
RotationX = RotationX Mod 90
If (RotationX < 0) Then
RotationX = RotationX + 90
End If
' draw it
If (RotationX < 45) Then
drawFace(item, CenterX, CenterY, scale, RotationX - 90)
drawFace(item, CenterX, CenterY, scale, RotationX)
Else
drawFace(item, CenterX, CenterY, scale, RotationX)
drawFace(item, CenterX, CenterY, scale, RotationX - 90)
End If
End Sub
Finally, DrawFace is called and this is where the magic happens. Worth noting is that the code that will draw one face of the block is the same, it just depends on the rotation, so it’s extracted to a method. To draw a complete block we then simply draw two faces 90 degrees apart at the same place.
To draw a face we first translate the camera so that the face will be drawn closer to us. Then we rotate it and after that we translate it back so we don’t scale it. Keep in mind that the calls to the camera, just like the rotate, translate and scale methods on Canvas, needs to be written in reversed order, so to speak. In the code below, it is the last line that translates the face towards us, then we rotate it, and finally, with the first line, we translate it back.
The rest of drawFace is not that hard. It gets the matrix from the camera, pre and post translates the matrix and then draws the bitmap with the matrix.
This code will draw each item as if placed in the origin in 3D space and then we move the items to the correct place on the screen using pre and post translate on the matrix. This moves what we draw in 2D space without changing the perspective. We could apply the translation in X and Y on the camera instead, then the translation would be in 3D space and it would affect the perspective. We’re not doing that here because I want the appearance of a larger field of view than the fixed field of view of the camera. Instead, we fake it by slightly rotating and scaling the items depending on the distance from center of the screen.
We calculate the light and create a LightingColorFilter that we can set to our Paint object.
Sub drawFace(item As item3D, CenterX As Float, CenterY As Float, scale As Float, RotationX As Float)
' save the camera state
mCamera.save
' translate AND Then rotate the camera
mCamera.translate(0, 0, CenterY)
mCamera.rotateX(RotationX)
mCamera.translate(0, 0, -CenterY)
' get the matrix from the camera AND Then restore the camera
mCamera.getMatrix(mMatrix)
mCamera.restore()
' translate AND scale the matrix
mMatrix.preTranslate(-CenterX, -CenterY)
mMatrix.postScale(scale, scale)
mMatrix.postTranslate(item.left + CenterX, item.top + CenterY)
' set the light
Dim cosRotation As Double
cosRotation = Cos(PI * RotationX / 180)
Dim intensity As Int
intensity = AMBIENT_LIGHT + (DIFFUSE_LIGHT * cosRotation)
Dim highlightIntensity As Int
highlightIntensity = (SPECULAR_LIGHT * Power(cosRotation,SHININESS))
If (intensity > MAX_INTENSITY) Then
intensity = MAX_INTENSITY
End If
If (highlightIntensity > MAX_INTENSITY) Then
highlightIntensity = MAX_INTENSITY
End If
Dim light As Int
light = Colors.rgb(intensity, intensity, intensity)
Dim highlight As Int
highlight = Colors.rgb(highlightIntensity, highlightIntensity, highlightIntensity)
mPaint.SetLightingColorFilter(light, highlight)
' draw the Bitmap
ExDraw.drawBitmap4(MyCanvas, item.bmp, mMatrix, mPaint)
End Sub
The DrawMe() sub is the overall function to draw all the items.
Sub DrawMe()
Dim i As Int
ExDraw.save2(MyCanvas, ExDraw.MATRIX_SAVE_FLAG)
MyCanvas.DrawRect(ClearRect, Colors.Black, True, 1dip)
'MyCanvas.DrawBitmap(FormBack, Null, formR)
For i = 0 To items.Size - 1
DrawItem(items.Get(i))
Next
ExDraw.restore(MyCanvas)
Panel1.Invalidate
End Sub
And in the Panel1_Touch sub we’ll animate our list. Note that it is here that we make sure all boxes face the same. This is done by the lines:
Doing like this will make the blocks rotate DEGREES_PER_SCREEN degrees when the user scrolls the list an entire screen no matter the pixel-height of the screen.
Here is the full sub:
Sub Panel1_Touch (Action As Int, X As Float, Y As Float) As Boolean 'Return True to consume the event
Dim DeltaY As Int
Select Action
Case Activity.ACTION_DOWN
CurrY = Y
'Log("down")
Case Activity.ACTION_MOVE
DeltaY = Y - CurrY
CurrY = Y
Dim i As Int
Dim it As item3D
For i = 0 To items.Size - 1
it = items.Get(i)
it.Top = it.Top + DeltaY
items.Set(i, it)
Next
ScreenTop = ScreenTop + DeltaY
CurrentRotation = -(DEGREES_PER_SCREEN * ScreenTop) / Activity.Height
DrawMe
'Log("move")
Case Activity.ACTION_UP
'Log("up")
End Select
Return True
End Sub
Today Microsoft released a preview of windows 8. Naturally we do want to test it but knowing Microsoft we do not want to mess up our existing machines 🙂
So we install it on a virtual machine. As for now it does not work on VMWare. However, VMWare 8 will come out in a couple of days and it should support Windows 8.
As for now, we are going to use virtual box 4.1.
Note: click on the pictures if you want to see the full screenshot.



 and support BANano & ABMaterial
and support BANano & ABMaterial